

La campagne d’acquisition menée pendant 3 jours a permis de procéder à une numérisation 3D à partir de l’outil ZEB-REVO, scanner laser mobile dont le premier intérêt est de présenter une facilité de déploiement importante. La tête du scanner laser mobile est mise en rotation par un moteur, permettant ainsi une émission sur 360° autour de l’axe de rotation. Celle-ci est en effet tenue à la main par un opérateur et reliée à une centrale d’acquisition située dans un sac-à-dos porté par celui-ci (figure 1). L’appareil scanne son environnement au fur et à mesure des déplacements de l’opérateur. En fonction de la complexité du milieu et de la densité de points souhaitée, l’opérateur progresse plus ou moins rapidement. La vitesse de progression est couramment comprise entre 1,5 et 3 km/h.
Les levés ont concerné les falaises de Socoa, constituées d’une alternance de bancs calcaires et marneux (flyschs) de pendage orienté vers l’océan atteignant jusqu’à plus de 50° et dont la hauteur est sur la zone concernée, comprise entre 20 m et 50 m environ. La campagne d’acquisition, rendue compliquée par les difficultés de progression sur l’estran, a permis de couvrir un linéaire d’environ 900 m en 3 heures d’acquisition effective, réparties sur deux cycles de basse mer. En sommet de falaise, les levés ont été réalisés sur 1050 m environ en 3h10 d’acquisition effective. Un nuage de points 3D global de près de 300 millions de points a ainsi été levé et géo-référencé par l’intermédiaire de points de référence « artificiels » levés au DGPS (cônes facilement identifiables dans le nuage de points, fig. 1a et 1b).

- Figure 1 : a) Scan d’un cône de référence. b) Levé de la position d’un cône de référence au DGPS. c) Identification d’un cône de référence dans un nuage de points
L’expérience réalisée a permis de mettre en évidence deux principaux enseignements :
1. L’outil s’est montré moyennement adapté au contexte testé pris dans sa globalité. La figure ci-dessous fournit un indicateur qualitatif de la performance de la démarche sous la forme d’un nuage de points 3D coloré selon la qualité du traitement : de rouge dans les zones où la qualité du traitement est jugée mauvaise à bleu dans les zones où elle est jugée bonne ; les zones blanches sont les zones non couvertes par le levé.
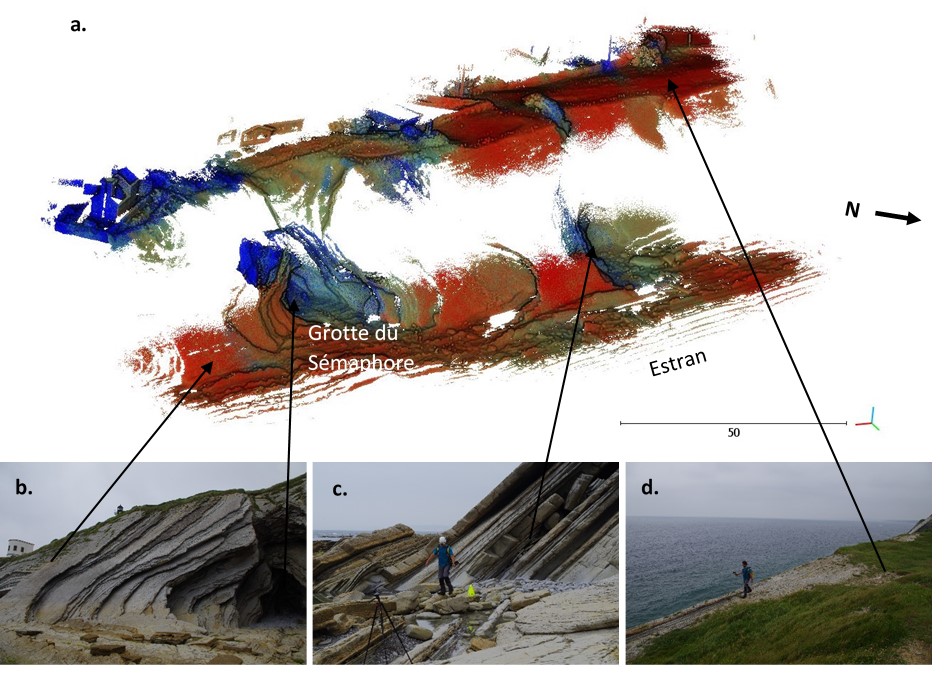
- Exemple de nuage de points 3D sur le secteur de la grotte du Sémaphore coloré selon l’indicateur qualitatif de performance de l’algorithme SLAM (a.). Les points colorés en bleu indiquent un traitement de bonne qualité : zones sous-cavées (b.) ou présentant un relief marqué (c.). Les points rouges indiquent un traitement de qualité moindre : dalles rocheuses (b.) et zones planes en sommet de falaise (d.) Les zones blanches sont les zones non couvertes par le levé
Il en ressort :
- que la portée maximale du ZEB-REVO s’est avérée dans l’environnement testé relativement réduite : portée maximale du scanner de 28,8 m mais 95 % des points scannés situés à moins de 4,30 m. Cette limitation induit l’existence de trous dans les nuages de points (zone intermédiaire de la falaise non couverte). La raison suspectée de cette portée relativement faible est la présence de lumière ambiante qui perturbe la réflexion des rayons émise par le scanner. En effet, des levés réalisés dans l’obscurité totale en cavité souterraine ont permis d’atteindre une portée de 35 m ;
- que le levé du sommet de falaise est de qualité limitée, en raison du caractère « ouvert » et « plat » du milieu (peu d’objets singuliers en élévation) et de la sensibilité de l’appareil aux « objets » mobiles (végétation soumise au vent) ;
- que les secteurs de meilleure qualité correspondent aux zones de plus forte rugosité et sur lesquelles des réflecteurs (bâti, ouvrages divers, végétation haute, etc.) sont bien répartis dans les trois dimensions.
2. L’outil s’est montré particulièrement bien adapté au levé de la Grotte du Sémaphore, singularité topographique marquante sur le linéaire levé. Il s’agit d’une cavité se développant sur 30 m environ vers l’intérieur du massif, le long d’une faille orientée N150°, et de plus de 15 m de hauteur de sous-cavage à son entrée. Le scan au ZEB-REVO a permis d’obtenir un modèle 3D géo-référencé de la cavité et des terrains qui la surplombent. Le scanner laser mobile se révèle particulièrement utile dans cette configuration puisqu’il donne accès à une information 3D sur l’ensemble de la cavité, notamment dans les vides créés par l’érosion différentielle des marnes entre les bancs calcaires. La topographie 3D de ces zones d’érosion n’est à l’heure actuelle possible avec aucun autre instrument, aéroporté ou terrestre.
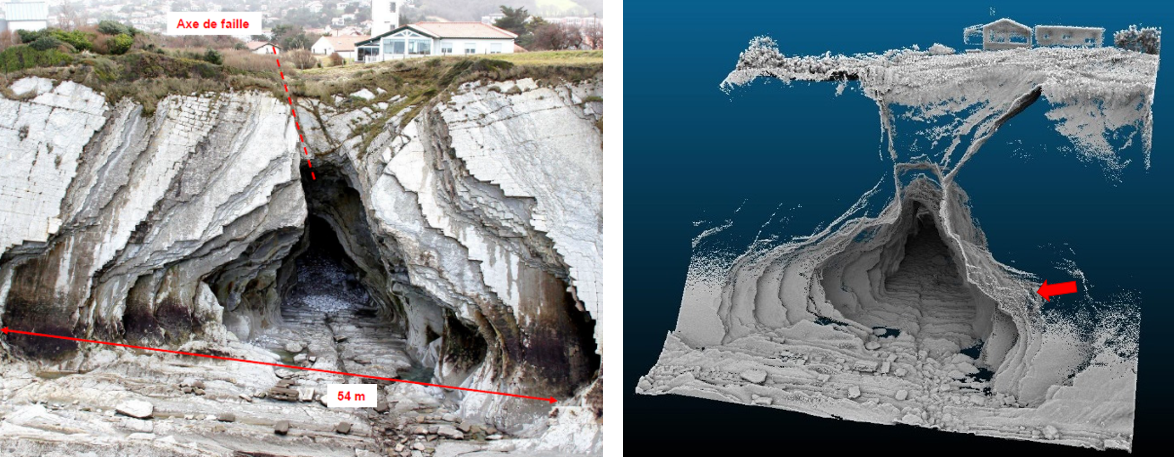
- Entrée de la grotte du Sémaphore. Photographie et vue en perspective du modèle 3D
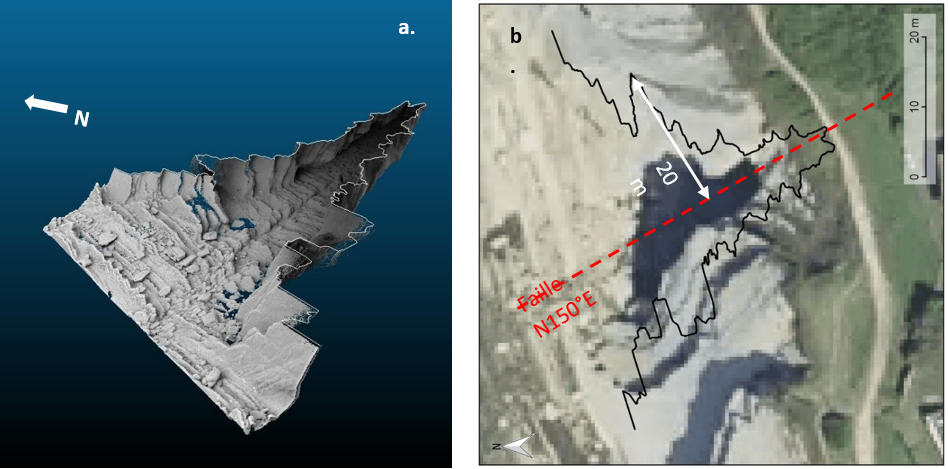
- Illustration du phénomène d’ablation latérale dans la grotte du Sémaphore. a.) Section en plan de la cavité à l’altitude 3 m NGF. b.) Report du profil de la cavité sur BDOrtho
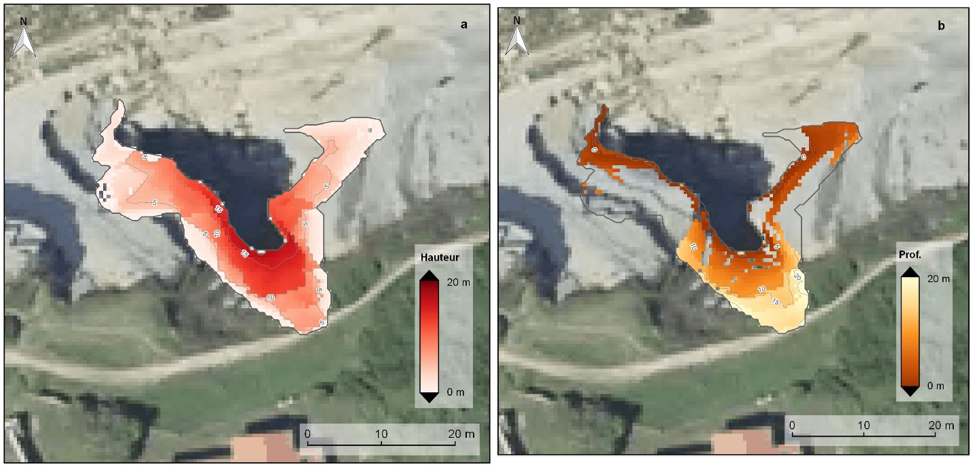
- Grotte du Sémaphore (la tête de la cavité est figurée en tiretés oranges). a) Cartographie de la hauteur de la cavité. b) Cartographie de la profondeur du toit de la cavité
Le test réalisé a permis de montrer l’intérêt de ce type d’acquisition par laser terrestre mobile pour le levé et le suivi « d’objets topographiques » singuliers tels que les cavités et autres zones de sous-cavage, pouvant constituer des secteurs sensibles vis-à-vis de la stabilité de la falaise. Outre la facilité de déploiement de cette technique, celle-ci s’avère en effet sur ce type d’environnement complémentaire aux méthodes d’acquisition 3D aéroportées plus classiquement mises en œuvre.
Le scanner laser mobile portatif s’avère également adapté à la modélisation 3D des ouvrages de protection.
Accédez au rapport via le lien ci-dessous.
Documents
| Type | Titre | Chargé le | Poids |
|---|---|---|---|
| RP-67271-FR « Levé 3D au scanner laser mobile de la falaise de la Corniche Basque - communes de Ciboure et Urrugne (64) » | 16/01/2019 | 4.4 Mo |